
Die Eulerschen Winkel sind eine Möglichkeit, die räumliche Orientierung eines starren Körpers im dreidimensionalen Raum zu beschreiben. Sie bestehen aus drei Winkeln, die nacheinander um drei Achsen gedreht werden, um die endgültige Orientierung des Körpers zu erreichen. Es gibt verschiedene Konventionen für die Reihenfolge der Drehungen und die Bezeichnung der Achsen, aber die häufigsten sind die „ZYZ“ -Konvention und die „XYZ“ -Konvention.
Die Eulerschen Winkel werden in vielen Bereichen der Physik, Ingenieurwissenschaften und Robotik eingesetzt, insbesondere bei der Steuerung der Bewegung von Objekten und Robotern im Raum. Sie können auch zur Darstellung der Körperhaltung von Tieren und Menschen sowie in der Navigation und Luftfahrt verwendet werden. Die Verwendung von Eulerschen Winkeln ermöglicht es, komplexe dreidimensionale Bewegungen und Ausrichtungen präzise zu beschreiben und zu kontrollieren.
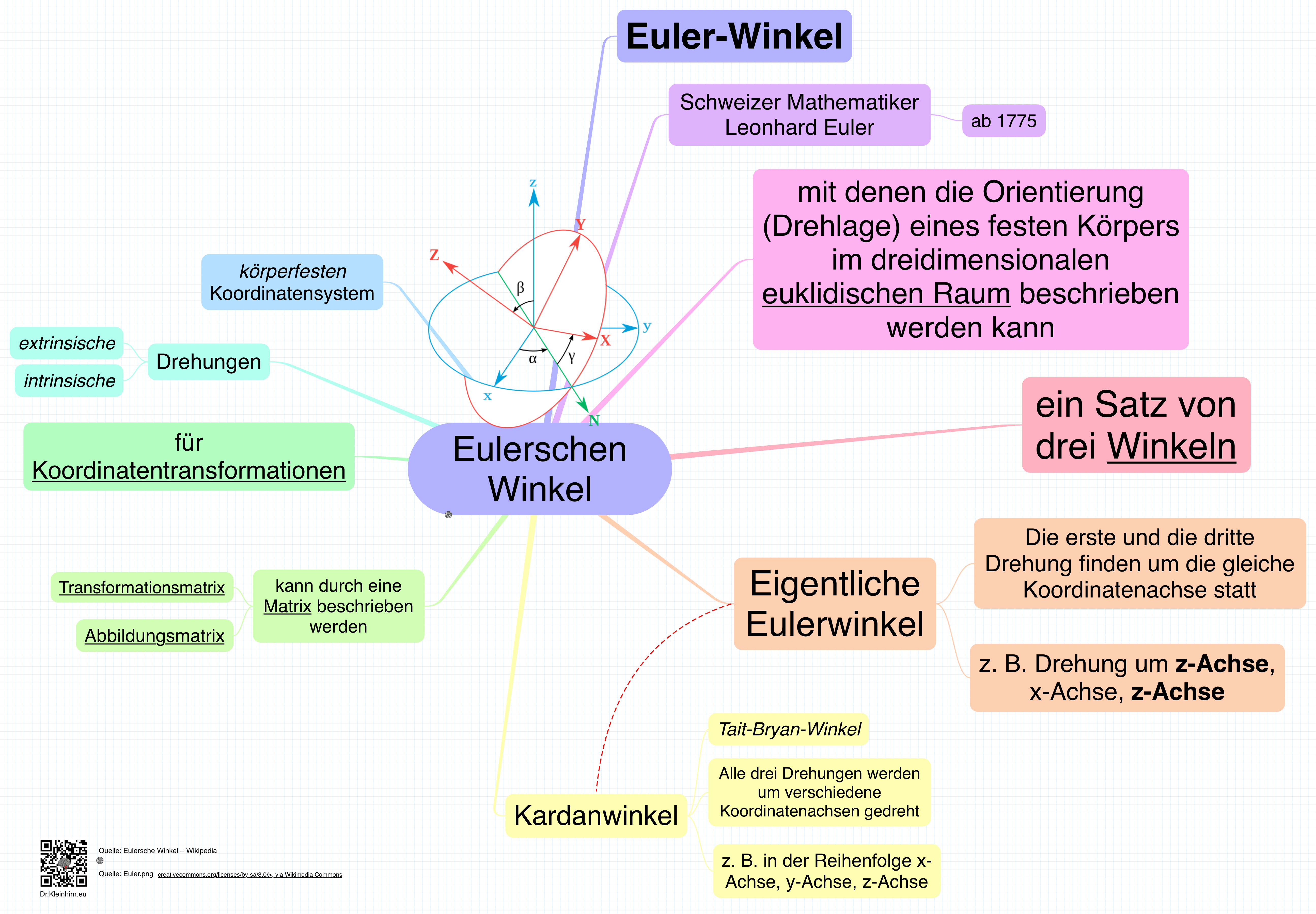
Eulersche Winkel: Beschreibung der räumlichen Orientierung eines starren Körpers im dreidimensionalen Raum
Bestehen aus drei Winkeln: Die nacheinander um drei Achsen gedreht werden
Verschiedene Konventionen: Reihenfolge der Drehungen und Bezeichnung der Achsen
Häufigste Konventionen: „ZYZ“-Konvention und „XYZ“-Konvention
Einsatzgebiete: Physik, Ingenieurwissenschaften, Robotik, Tier- und Menschendarstellung, Navigation und Luftfahrt
Steuerung der Bewegung von Objekten und Robotern im Raum
Präzise Beschreibung und Kontrolle von komplexen dreidimensionalen Bewegungen und AusrichtungenMathematische Berechnung: Komplexe Trigonometrie und Matrixmultiplikationen
Verbindung zu anderen Koordinatensystemen: Quaternionen
Herausforderungen: Singularitäten und die Notwendigkeit der Vermeidung von Gimbal Lock.
Download eulerschen-winkel.pdf.